image2mass: Estimating the Mass of an Object from Its Image
Trevor Standley,
Ozan Sener
Dawn Chen
Silvio Savarese
Abstract
Successful robotic manipulation of real-world objects requires an understanding of the physical properties of these objects.
We propose a model for estimating one such physical property, mass, from an object’s image. We collect a large dataset
of online product information containing images, sizes, and weights. We compare several baseline models for the image-to-mass
problem that were trained on this dataset. We also characterize human performance on the problem. Finally, we present
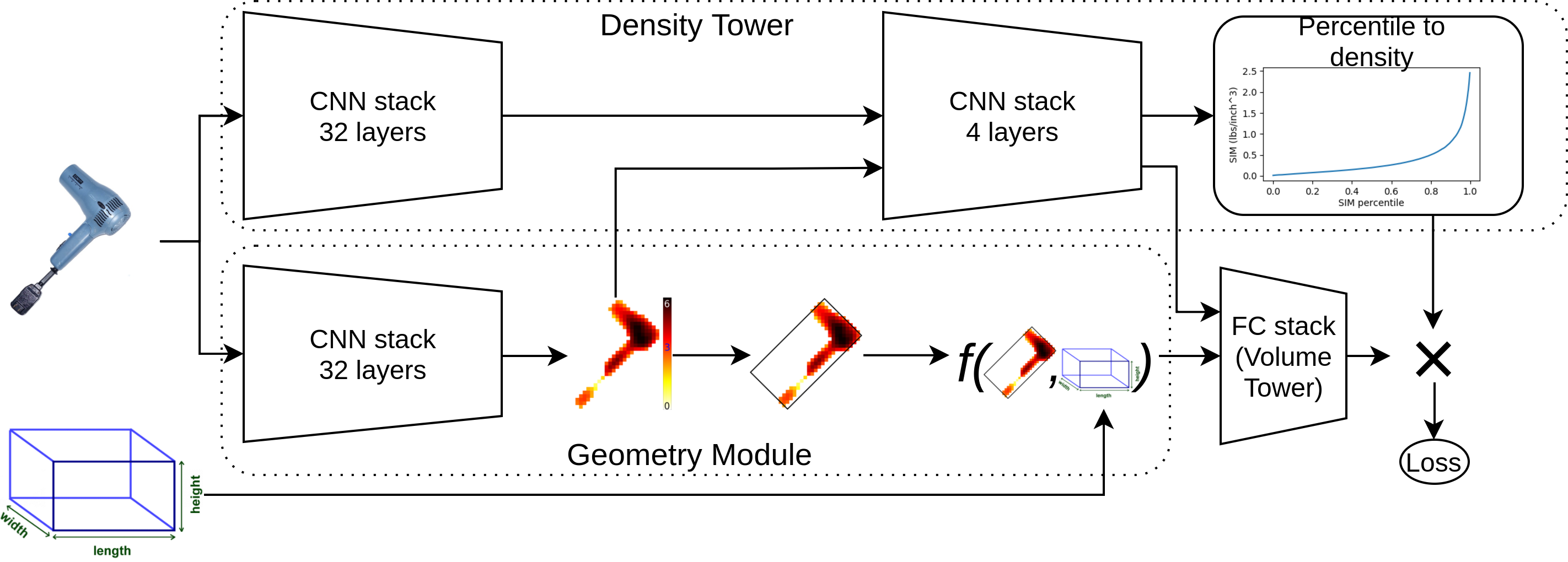
a model that takes into account an estimate of the 3D shape of the object. This model performs significantly better than
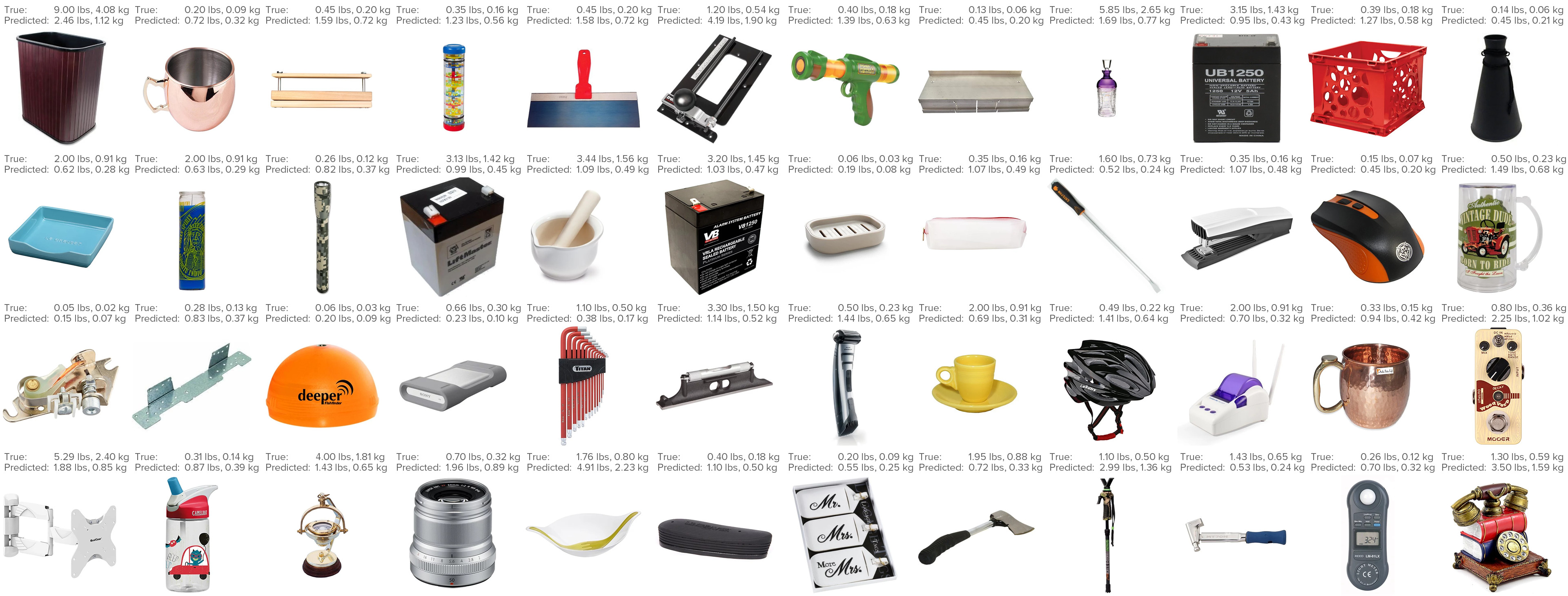
these baselines and compares favorably to the performance of humans. All models are tested on a held-out set of product
data, as well as a relatively small dataset that we captured with a scale and a digital camera.
links: